
Last time, we created a working boot sector, the BIOS can find with the help of magic numbers. You can read more about it here.
The question here is “Why do we need a second stage boot loader?”. We can implement all of it in the boot sector, using Assembly, so… why?
The problem is… size limits. You can’t store over 512 bytes of code in the boot sector, so if you want to make a super-duper boot loader (like GRUB or similar) you need to store all of it somewhere else, but not in the boot sector itself.
And that is one of reasons, we need to have a second stage boot loader.
Refresh your memory
Based on the previous article, we got a simple boot program that prints “Hello, World!” to the output. Let me show this again:
Now, we need to improve this program to resolve the second stage boot loader. Let the journey begin!
We will not discuss switching to 32 or 64 bit modes here for the sake of simplicity. All we do here is just printing a message, but from second stage boot loader.
Preparing the environment
This time, I will implement all of it on Linux Mint.
The reason for that is that it’s too hard to compile sources from one host to another target, in my case, the host is OSX and the target is i386. For that, we would need to build gcc on our own with a lot of custom flags. It’ll be much simple to just work on a Linux machine.
Let’s start by making sure that our system is upgraded, has a build-essential package, qemu and nasm.
sudo apt-get upgrade
sudo apt-get install build-essential
sudo apt-get install nasm
sudo apt-get install qemu
As a result, we will write the first stage via assembly and compile it with a nasm compiler. The second stage will be written in C language and built with the help of all packages that build-essentials comprises. When we finish with all the parts, we will test our boot loader via qemu emulator.
The Concept
Let’s begin with a conceptual overview of how to combine primary boot loader code written in Assembly language with the code of secondary boot loader written in C language.
What comes to mind in the first place? You can implement an Assembly program, that fits into our 512 bytes and will be able to call some external program at specified offset (this external program can be stored anywhere you want).
And that is the edge where second stage boot loader begins: everything that happens in the boot sector of the drive is the first stage. All that happens outside of it is the second stage.
Therefore, we must achieve the following goals:
- Procedure that can read from disk, but in first stage. It will try to read our secondary boot loader and load it into the memory.
- Procedure that tries to call our secondary boot loader (which is loaded into memory by step above) and transfers an execution to it.
- Secondary boot loader itself that prints a message, implemented in C language. This will be our minimal boot loader with one function. Let’s call it loader_main();
I hope these steps are clear enough, and we can start with implementing those.
Read from drive via Assembly
Our first step is to have an ability to read some data from drive and load it into the memory. BIOS has the required interruption, so we can use it for reading specified offset from the drive. Its interruption code is INT 13,2 — Read Disk Sectors.
We can implement the whole procedure in the following way:
There are two procedures: disk_read and disk_read_error. Based on
documentation of INT 13,2, we need to store the address of memory, where we want
to store the read result, in bx register. We will specify it as an argument
before calling disk_read procedure in our routine. In case something went
wrong, disk_read_error procedure is called.
We will use it for reading our second stage boot loader binaries and load them
into memory by our specified bx register.
It’s worth mentioning that we are reading from a specified position (cylinder=0, head=0, sector=2, sectors to read=dh register). That means that we have to store our second stage boot loader at this location on the drive.
Call the loaded binaries via Assembly
The next step after reading from drive is to pass execution to a specific
address in memory where our secondary loader will exist. But how to decide, what
the address should be? Well, again, for the sake of simplicity, let’s just use a
constant value 0x1000. This will be the address where secondary loader will be
stored.
Since we already know the location of the second stage in memory, it’s easy to do, just make a call for a specific address in memory:
call OUR_SECOND_STAGE_OFFSET
jmp $
At this step, we will read binaries from the drive, using disk_read procedure,
and load them into memory by our known address and call it:
OFFSET equ 0x1000 ; where to store boot loader binaries
mov bx, OFFSET ; set address to bx
call disk_read ; read our binaries and store by offset above
call OFFSET ; give execution to our loaded binaries
jmp $
We have implemented the ability to load our second stage boot loader code into memory and call it, but we don’t have a secondary boot loader itself. So let’s start with writing our loader_main() in C language.
“Hello, World!” in C language
Since we are not working with protected mode (32-bit architecture) but with
16-bit architecture, we can’t rely on simple “Hello, World!” and printf here.
Also, that is because gcc doesn’t have libc stubs for 16-bit architecture.
So, for the sake of simplicity, let us print alphabet instead, using Assembly
interruptions:
What is going on here? 0x41 is a hex value of the letter “A” and we are
iterating it through right to the last letter “Z”. We wrote each of these
letters into output by emitting a BIOS interrupt for each letter. So, as a
result, we will get a “ABCDEFGHIJKLMNOPQSTUVWXYZ” string.
But that’s not enough. We need to make an entry point in Assembly for our second stage, so linker can link all object files and make sure that everything is tied properly.
We know, that our entry point in C language is a function called
loader_main(). So, we are declaring it as an extern function and calling it
from our entry point in Assembly:
global _start
[bits 16]
[extern loader_main]
_start:
call loader_main
jmp $
The next step is wrapping all these things together.
Compiling Assembly and C into binary files
Let’s compile our first stage boot sector:
nasm boot.asm -f bin -o boot.bin
That’s it for our first stage. We have raw binary format here. Now, for the interesting part — second stage.
We need to make an elf object file from our Assembly entry and our C file.
Afterwards, we need to link them:
nasm loader.asm -f elf32 -o loader_entry.o
gcc -O0 -g -ffreestanding -m32 -c loader.c -o loader.o
ld -o loader.bin -m elf_i386 -Ttext 0x1000 loader_entry.o loader.o --oformat binary
Using nasm, we are compiling our entry file to elf object. The same with our C
file. But, when we are linking these object files together, we need to specify
an offset 0x1000 by -Ttext option, since we are loading it in our first
stage exactly by this address.
You will get a raw binary file which is called loader.bin in your directory.
That is your second stage boot loader.
Now, behold the magic of concatenating your stages into one binary image and run it on your QEMU emulator:
cat boot.bin loader.bin > image.bin
qemu-system-i386 -fda image.bin
You will see the result of our hard work:
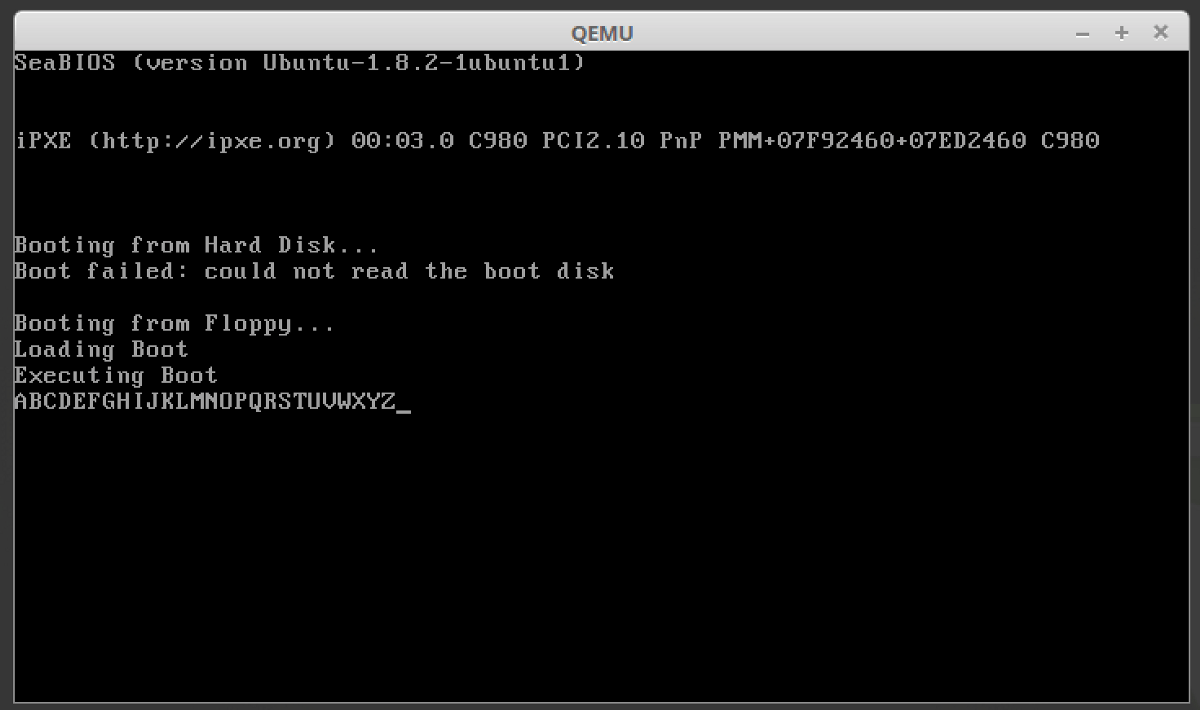
As you can see, we could call our second stage boot loader from the primary one. They were totally separated and build process for the second one is different. Using this approach, you can implement anything you want with C language, compile and link it with an entry and get binary file, that will be loaded by the first stage boot loader.
Goal achieved!
Bonus
I made a script you can use on your Linux machine (Ubuntu-based) if you want to scaffold it in a matter of time and play around:
curl https://gist.githubusercontent.com/ghaiklor/c9b4cfa9111c87e5e12df16f337a338e/raw/3eb1b84fb7a58a47ef6f690de56ebb1b6b5e8c20/build.sh | bash
Thanks
I hope this article was a great read for you. Leave your feedback in the comments, share it with your geek-friends and clap.
If you want to investigate further, check the sources of my simple OS.
Eugene Obrezkov, Senior Software Engineer at elastic.io, Kyiv, Ukraine.



Comments